无接触地把位置和角度测出来
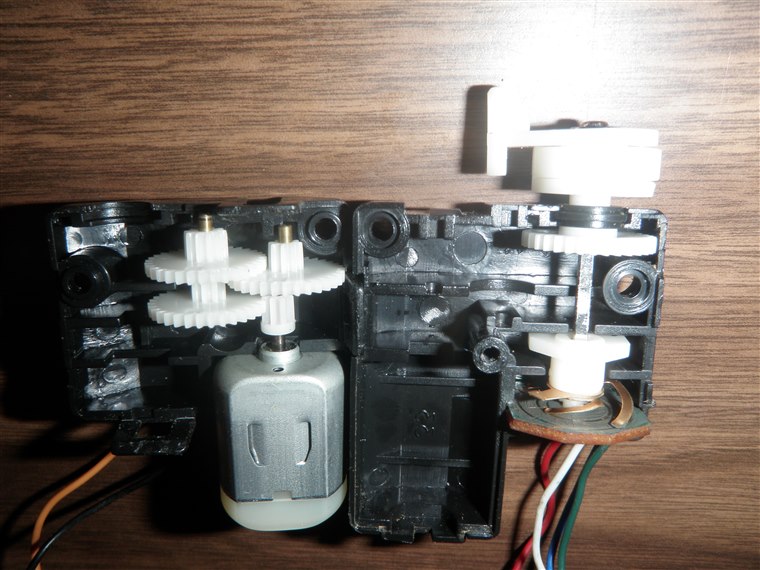
坏的总是接触点。电位器靠一个滑动触点在电阻轨上拖着读位置,每读一次就把轨道磨掉一点,最后在机构最常停留的那个位置磨出一个死区。无接触传感把滑动触点拿掉,改读一个场。什么都不碰,就什么都不磨。
麻烦没有消失,是搬了家。转动的磁铁、靠近的金属目标、漫过电极的液体,每一个都靠几何关系耦合到传感器上,几何就成了测量的一部分。磁铁粘偏轴心半毫米,角度读数就弯。线圈装得离目标太远,丢掉的信号再也找不回来。电容电极的接地回路走得草率,读出来的液位根本不存在。数据手册上印的分辨率,是在厂商测它时那个理想对位下挣到的,产线装配就是这些位保住还是丢掉的地方。按运动件的材质选传感原理,然后把安装当成电路的一部分来设计,因为它就是。
从磁铁上读角度
旋转的场合全是同一个套路。一颗小磁铁,沿直径方向磁化而不是沿轴向,坐在轴端。芯片在磁铁下面用一组敏感元阵列采磁场方向,从场分量里算出角度,所以上电那一刻答案就是绝对的,不用找零位,不用从原点数起。磁铁就是几毫米的钕磁体,径向磁化没有商量余地:普通的轴向磁化圆片给出的场形完全不对。器件之间拉开差距的,是分辨率、接口、速度,还有磁铁装得稍微偏一点时各家能扛到什么程度。
AS5600 做无接触磁旋转角度测量,十二位,整圈四千零九十六个位置,生来就是接替电位器的。它走 I²C,也能改成输出比例模拟电压或 PWM,给电位器写的固件不用动就接着用。起始角和终止角可编程,把一段机械行程映射到整个输出量程,旋钮和云台用的就是这一手。自动增益级会报告磁铁是太近还是太远,等于免费体检芯片自己管不了的那个机械变量。十二位让每一步小于十分之一度,比它后面那套齿轮的回差还细,磁铁不动时看门狗把器件降到低功耗。带它的小板便宜又遍地都是,小型机器人圈的第一颗磁编码器默认就是它。
AS5048A 做高分辨率绝对角度测量,十四位,一万六千三百八十四个位置,每步五十分之一度上下。SPI 读出,PWM 兜底,零位烧进一次性可编程存储,机械想怎么装就怎么装,装完软件归零。比 AS5600 多出的两位,用在角度喂控制环而不是喂显示的地方:机器人关节、相机云台、天线座,环路增益会把传感器每一个计数的噪声放大成看得见的抖动。两颗能在一条 SPI 总线上菊花链,一次传输把读数串着时钟出来,反正切由内部 CORDIC 引擎算,霍尔阵列喂数。它对磁铁位置的要求也相应更高,分辨率越细,偏心越早现形,绕圈一周重复一次的误差波。
MA730 做高速磁角度测量,速度就是这颗的全部性格。轴转到每分钟几万转它还保持十四位,除了 SPI 绝对读出,它还生成增量正交输出,经典的 ABZ 脉冲,每圈脉冲数可编程。第二个接口才是重点:电机控制器在边沿发生的那一瞬接住它,不用轮询寄存器去读一个已经过期的角度。每圈脉冲数最高编到完整十四位计数,索引脉冲落在哪个角度也由你定,控制器期待什么光电编码器它就能扮成什么。滤波窗口分档可调,拿角度噪声换群延迟,同一颗器件慢轴上调安静、快轴上调快,短档几十微秒出答案,代价是低位跳舞。角度是去喂换相而不是喂界面的时候,选它。
TLE5012B 给电机做精密角度反馈,感场的方式也不一样:巨磁阻而不是霍尔片,用电阻随电流与磁化夹角变化的元件读场方向。它边跑边自校准,对着出厂终测存下的参数跟踪电桥增益和失调随温度的漂移,十五位角度出来时已经修正完,不劳主机收拾。它按预配置变体出货,副接口出厂就替你设好,增量脉冲、PWM、或者霍尔开关仿真顶替三颗分立换相传感器,固件团队继承一个能用的接口,不用自己配。同步串行接口按需给绝对角度,每个读数都带着状态位,场太弱或内部故障都打旗,安全评审员点名要的就是这种记账。英飞凌的车规件,气质藏不住:数据手册读起来像安全文档,这颗器件最舒服的位置,就是拧在一台不许谎报转子位置的电机上。

转快了数字会怎样
轴转得快,角度就成了移动靶,传感器给的答案永远旧一点。芯片要时间采场、滤波、算角度、再把它时钟出接口,这些延迟加成一个传播时间,直接换算成角度误差:每分钟一万转的轴每毫秒扫过六十度,总延迟一百微秒,控制器拿到手的角度就旧了六度。在磁场定向的电机环里,这个误差落进转矩矢量,电机用发热和掉出力来买单。滤波坐在同一笔交易里。窄滤波让低位跟着噪声跳,宽滤波把低位按住,也吃掉控制环想要的带宽,对的档位取决于哪根轴,所以好器件把它做成可编程。接口是第三条腿。串行总线轮询绝对寄存器一次几十微秒,答案在路上还在变老;增量边沿在角度跨过界限那一瞬到达,解析零成本,高速器件费心生成它们就是这个原因。这一切在轴停着的台架上一点不露面,到了转速上来的那天全部摊开,决定电机是唱歌还是结巴。十二位对十四位的静态分辨率之争在宣传页上就分完了胜负;动态那一场用微秒计,输赢电机自己能感觉到。
转速一上来,要紧的规格用微秒计,不用位计。

不旋转的位置
不是所有位置都是角度。按键帽下压十分之一毫米、阀芯在孔里滑动、冷却液沿罐壁上爬,这些是位移,归另外两类场管。线圈接进谐振电路,导电目标一靠近电感就掉,因为目标里感出的涡流顶回磁场,谐振频率应声上移,测频率就是测距离。一对电极之间进来任何介电常数不同的东西,液体、指尖、动板,电容就变,几飞法的变化驮着位置信息。谐振频率落在几百千赫到几兆赫之间,由线圈和旁边那颗电容定。
LDC1614 做电感式接近和位移测量,把那个谐振频率读到二十八位,四个通道,PCB 上绕一圈铜走线就成了精密位置传感器,物料成本等于零。目标只要导电就行:钢支架、机构上的铝旗、密封按键下的金属穹顶。线圈和目标之间的油、灰、墨和一切不导电的脏东西,对读数毫无影响,工业位置测量最脏的那一头归电感式管,原因就在这。近距离亚微米的运动都分辨得出,第二只线圈接成参考通道,抵掉第一只躲不开的温漂,铜电阻跟着热走,目标动不动它都走。通道轮流经过共享内核转换,参考时钟稳不稳,决定二十八位里多少位装的是信息、多少位装的是抖动。设计工作从料单挪进版图,线圈直径定感应范围,下方的地铺要保持距离。
FDC1004 做电容式位置和液位测量,四通道,十五皮法窗口里飞法级分辨率,让它能走出实验室的是屏蔽驱动。一圈有源屏蔽电极围着感应电极同电位驱动,传感器背后一切东西的寄生电容被甩出去,感应瓣指向版图想让它指的方向。招牌动作是隔着塑料罐壁测液位:铜条贴在罐外的柔性板上,罐里的水用它八十上下的介电常数发信号,不开孔、不用浮子、没有会漏的密封。每个通道对屏蔽测或对第二只电极差分测,失调寄存器把组件的静置电容从窗口里挪走,量程全花在信号上,不花在线缆上。罐底保持淹没的参考电极,抵掉温度对液体介电常数干的事。接近唤醒也是同一套,手靠近面板,皮法在碰到任何东西之前就动了,每秒几百次的采样率对按分钟变化的液位绰绰有余。
两类之间怎么选,主要看目标是什么。脏地方的导电运动件归线圈;液体、人手、不导电的零件归电极。失效模式也对调:电感式不理油污,但记恨旁边的结构金属;电容式隔着塑料看得见,但记恨导电膜、结露和草率的接地。结露最损,面板内侧一层哈气,读成一只不存在的手指,干了才消。诚实的答案有时是都用,电容唤醒面下面压一颗电感按键,互相补盲区。
安装才是真正的数据手册
上面每一颗器件报精度,都报在一个它管不着的几何条件下。磁器件要磁铁对准旋转轴心在零点几毫米以内,悬在增益级点头的高度上;偏心会在角度里画出一圈一个周期的误差波,分辨率再高也抹不掉。线圈要目标待在大约一个线圈直径以内,灵敏度随距离陡降,目标停得太远就只剩噪声。电极要场线落在被测物上,每一厘米不带屏蔽的走线都添寄生电容,把驮信号的那几飞法埋掉。校准能吸收坏安装里可重复的部分,固定偏移、已知曲线。吸收不了产线上一台一台变的那部分,所以公差图纸在固件开口之前就把良率定了。磁器件的增益指示就是为这一刻准备的,测试夹具一秒读一个的过线数。
选型于是倒着从机械往回走。轴端带磁铁的旋转轴,活儿是旋钮就 AS5600,控制环要计数就 AS5048A,轴转得快到延迟成了敌人就 MA730,电机本身是产品、角度要过车规审查就 TLE5012B。滑动或形变的导电件归线圈和 LDC1614;液体或靠近的手归电极和 FDC1004。它们都便宜到在样机上把两种原理都验一遍,比为此争一个星期省钱。
滑动触点磨坏,因为它碰着。这些器件长寿,因为隔着距离测,而这段距离的价钱,用毫米级的对位来付,一付就是整个产品寿命。
相关信息

- 2026.06.04 给设备做声音采集和振动监测

- 2026.06.04 把流量和液位测准的传感方案

- 2026.06.04 在联网设备里感知温湿度、气体与空气质量
- 2026.06.04 用电源管理把电池设备的续航拉长